Labelling Depth Images
Topics of the week
- Improvement of the labelling algorithm to be faster
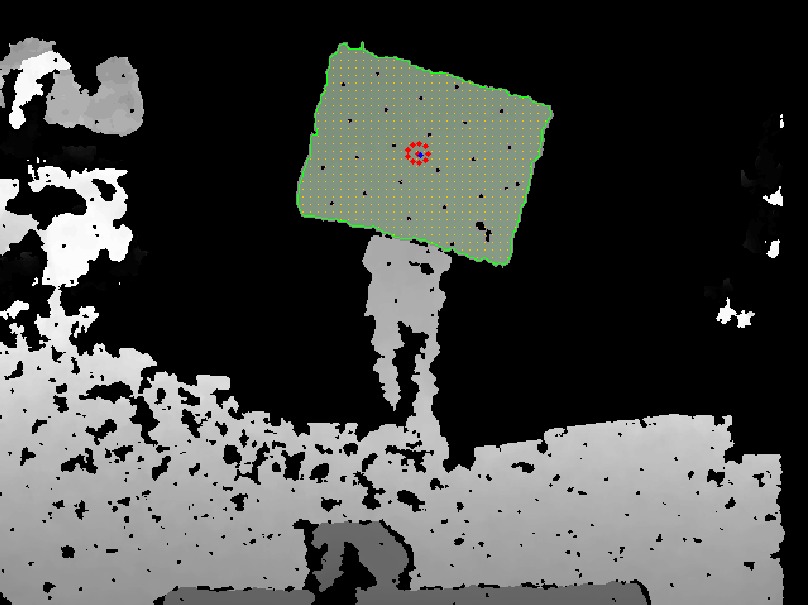
- Improvement of published labelled image to give visual feedback of the labelling
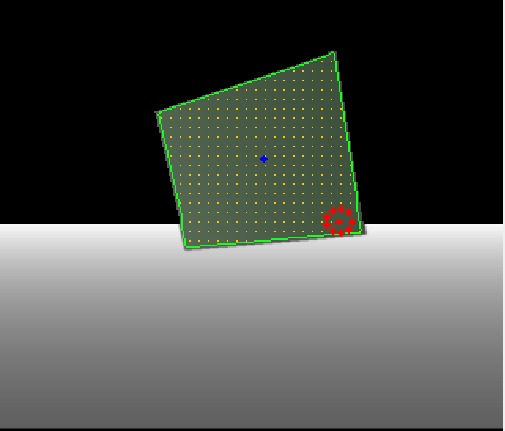
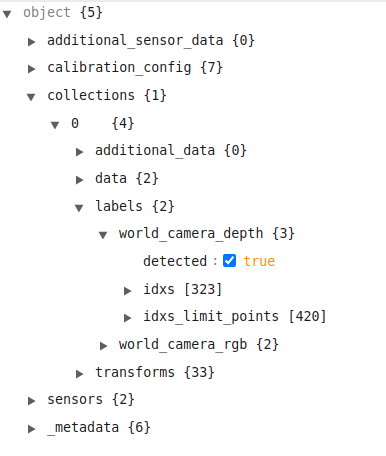
- Creation of a label dictionary that includes the coordinates of the labelled points
- Creation of interactive marker to be used as a seed point used for the propagation algorithm
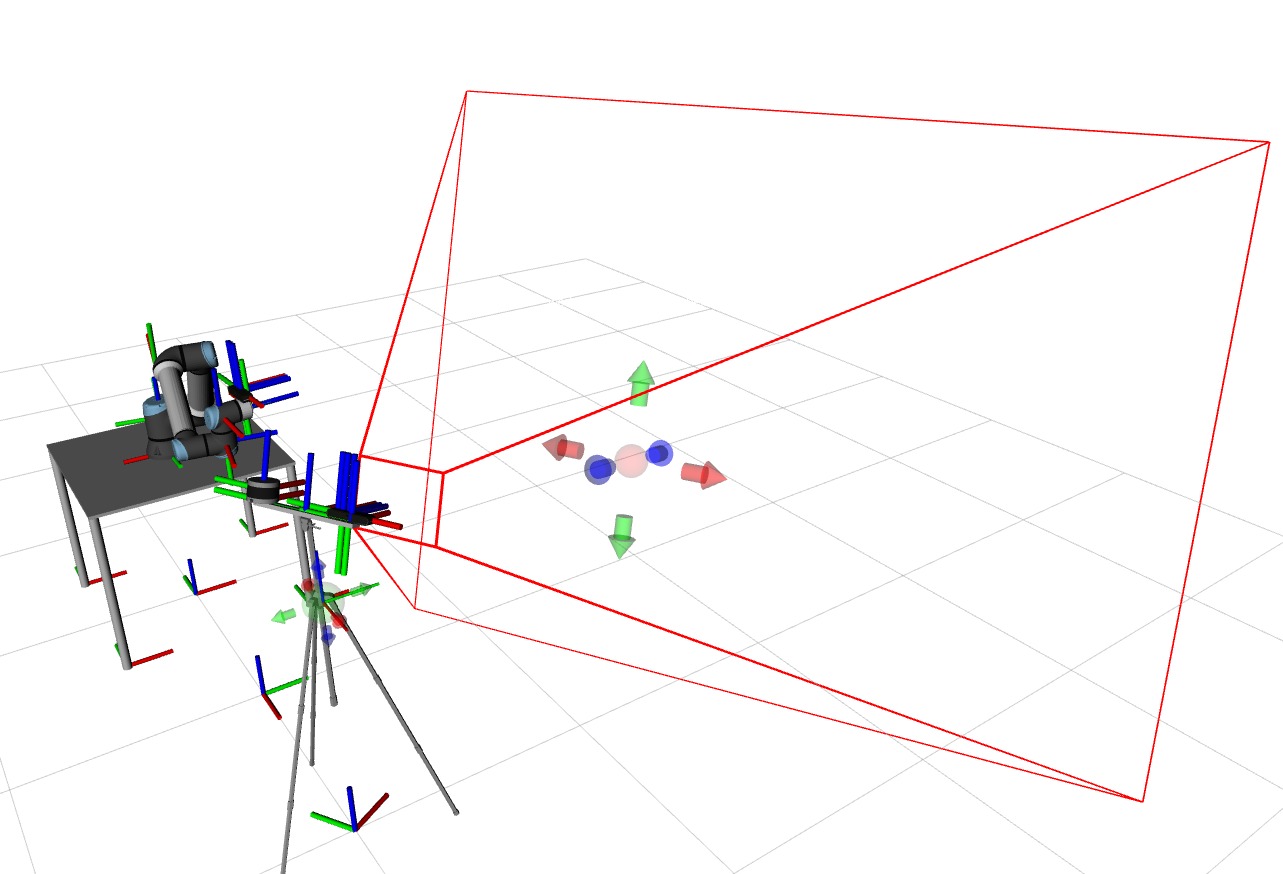
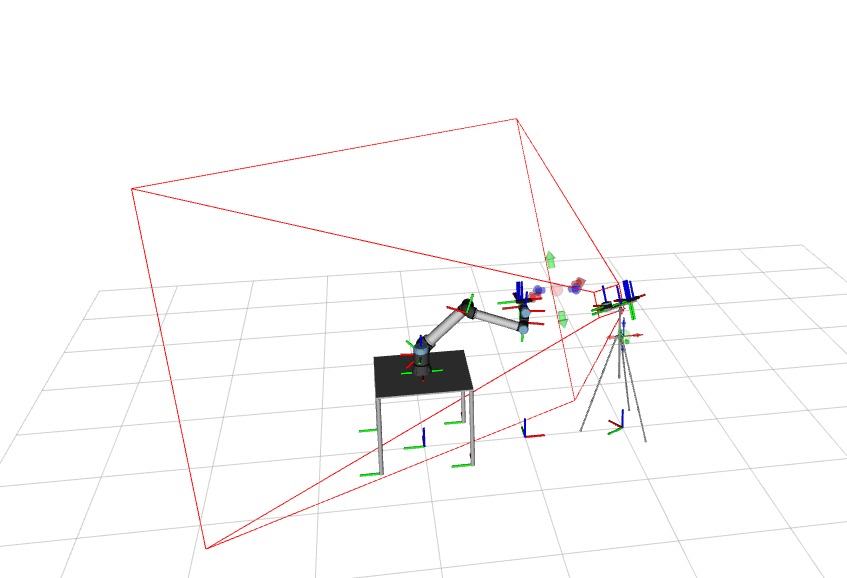
- Including the visualization of the depth camera frustum (calculated with the pinhole model
parameters) to help localize the seed point inside the image
- Configuration of the function that creates the dataset to include the depth modality and
adaption to save depth images
- Testing in simulated and real environments with new bagfiles
- Studying and beginning of the implementation of the objective function for the depth modality
TODO
- Check inconsistencies in calibration results with real data
- Adapt ATOM to calibrate RGBD sensors.
- Improve calibration pattern support to improve the depth images
- Define solution to calibrate depth images
- Define solution to allow the robot to move the calibration pattern (robot assisted)
- Calibrate a system that includes a depth sensor
Issues
Add depth component to ATOM's framework - open
Create conversion script for dataset version 2 - open
Chessboard support - documentation
(opened but not this week's work)