A Week in Barcelona
Activities in Barcelona:
- Meetings with several PhD students to discuss our works
- Meeting with the head of the CVC's Engineering office to get to know the current projects
- Participation in group reading - presentation of a paper
- Reading suggested papers relevant in the areas of human pose estimation and multimodal object recognition
Activities related with the project:
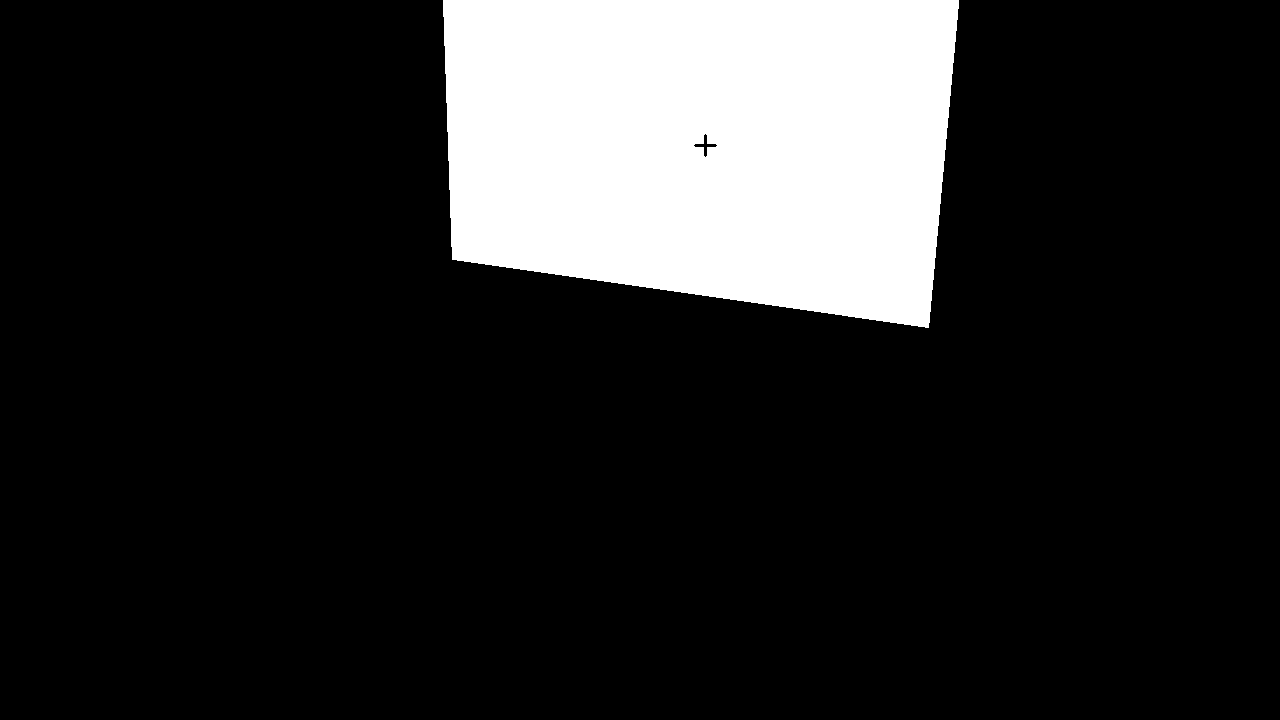
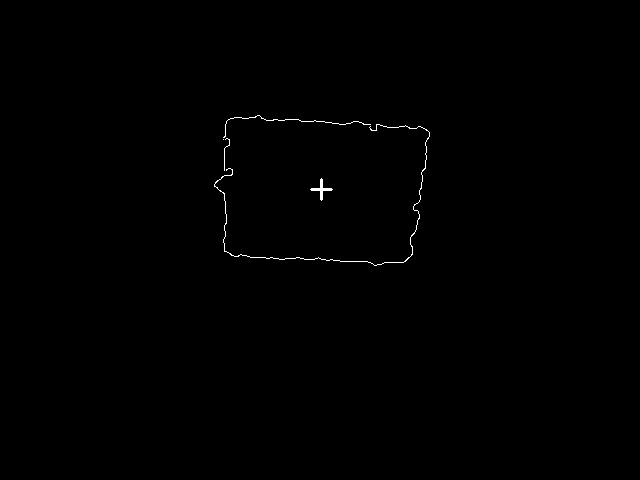
Simulated images
This week I was able to segmented the chessboard pattern shape from the depth images. I did this by first, removing the background (that is, the furthers points) from the depth image, by turning them black, and then replacing all the black pixels to a dark gray (to increase the resolution of the normalization). After this, I did new a normalization of the 16bit images which got me more resolution between the chessboard and its support. After this, I applied a flood fill algorithm made by hand, filled the point with a fillholes and got the edges with a canny. The results can be seen bellow for both simulation and real data. This is also already implemented in ATOM's collector and publishing labelled images to test but still not working perfect.
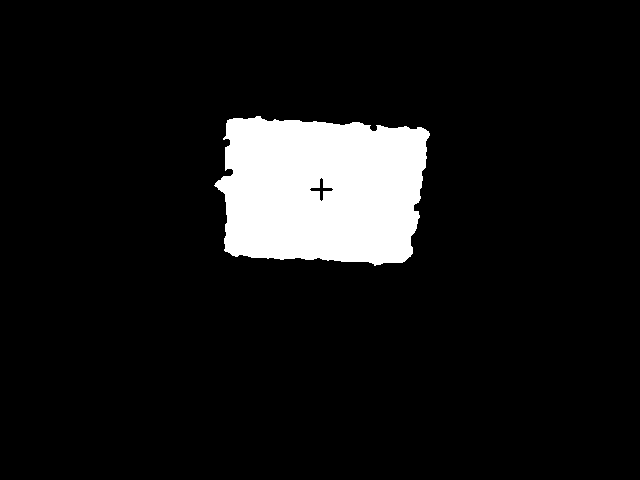
Real images

TODO
- Check inconsistencies in calibration results with real data
- Adapt ATOM to calibrate RGBD sensors.
- Improve calibration pattern support to improve the depth images
- Define solution to detect calibration pattern in depth image
Issues
Add depth component to ATOM's framework - open
Create conversion script for dataset version 2 - open
Chessboard support - documentation
(opened but not this week's work)