Solving RGBD problems
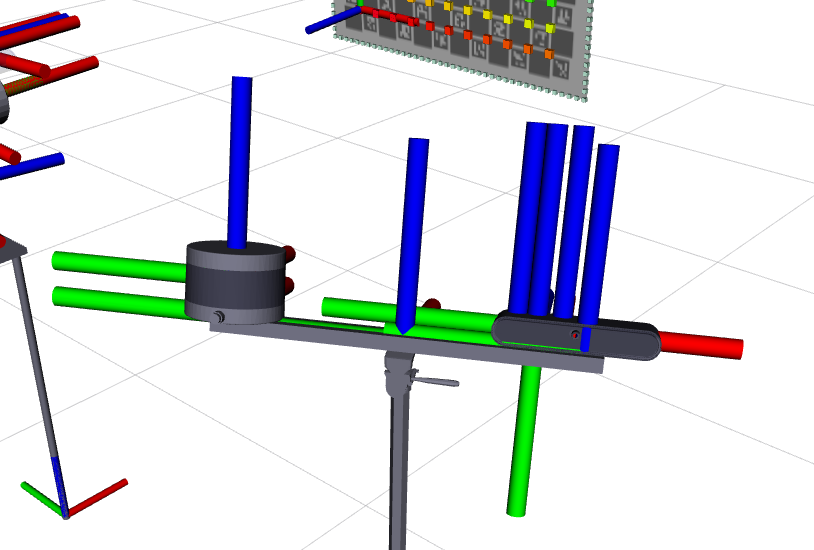
We noticed an inconsistency with the RGBD camera calibrations where there was a disparity between the ghost (real position of the camera) and the position of the calibrated camera, as showed in the image above. This problem was caused by the astra gazebo plugin, that was associating only one frame to both the rgb and depth components.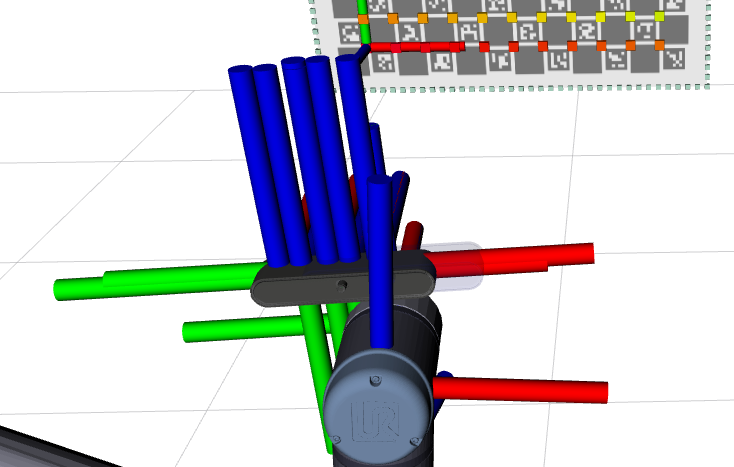 To solve this, I had to reformulate the gazebo astra plugin to have two separated components:
the rgb component from the depth plugin was eliminated and this component was associated with
the depth_frame. Then, I created a new component in a separated gazebo plugin that only had the
rgb camera, associated with the rgb_frame. The image above shows the ghost on top of the calibrated
sensor after this problem was solver.
To solve this, I had to reformulate the gazebo astra plugin to have two separated components:
the rgb component from the depth plugin was eliminated and this component was associated with
the depth_frame. Then, I created a new component in a separated gazebo plugin that only had the
rgb camera, associated with the rgb_frame. The image above shows the ghost on top of the calibrated
sensor after this problem was solver.
 To note that this problem was causing errors in the simulated calibration and would prevent us to add
the depth component of an RGBD camera to ATOM's framework, because both the RGB and depth components
were being published in the same frame (and consequentially, one would always have a displacement), so
there was not two separated coordinated systems to calibrate each of the sensors.
To note that this problem was causing errors in the simulated calibration and would prevent us to add
the depth component of an RGBD camera to ATOM's framework, because both the RGB and depth components
were being published in the same frame (and consequentially, one would always have a displacement), so
there was not two separated coordinated systems to calibrate each of the sensors.
TODO
- Check inconsistencies in calibration results with real data
- Check solution to hold the calibration pattern
- Calibration of simulated system with 3 lidars and 1 camera
- Adapt ATOM to calibrate RGBD sensors.
Issues
Add depth component to ATOM's framework
Create function to examin dataset - closed
Disparities in calibration results
Improve phased execution - closed
RGBD camera simulation in gazebo is not using the proper frame ids - closed
(opened but not this week's work)