Resubmission of paper, visit to company, rails mounting and calibration with 3 LiDARs
This week's progress:
- Resubmission of submitted paper, including the comments of the reviewers
- Visit to Bosch to access possible study cases in the context of the project
- Mounting the rails in the LarcCell structure to organize cabling. Also repositioning of sensors to cover more cell volume.
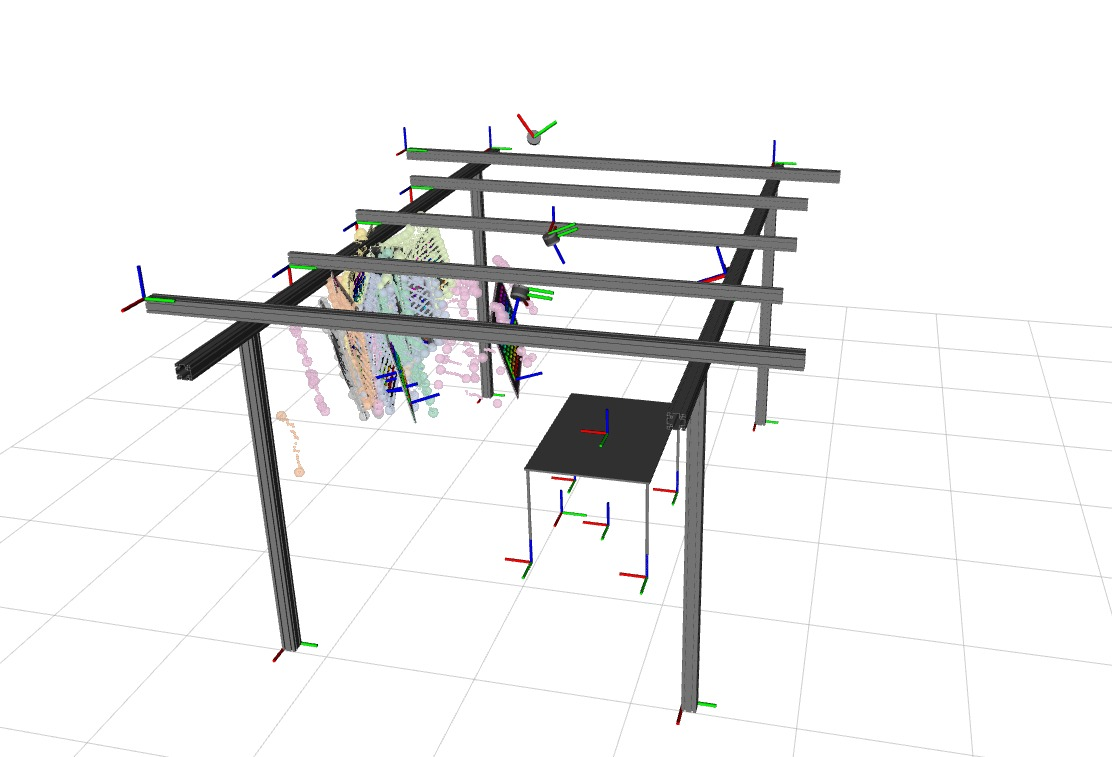
- Calibration of a subsystem of LarcCell with 3 LiDARs and one camera with the real setup. The results were not the best, but I believe the problem was the "bad quality" of the rosbag: inconsistent movements, not long enough pauses that allow for a steady movement... I believe the support for the calibration pattern will solve most of these problems.
TODO
- Check inconsistencies in calibration results with real data
- Check solution to hold the calibration pattern
- Calibration of simulated system with 3 lidars and 1 camera
- Adapt ATOM to calibrate RGBD sensors. I think this should be my next line of work while waiting for new computer.
Issues
(opened but not this week's work)
calibration in simulation mode - open
calibration with real hardware - open