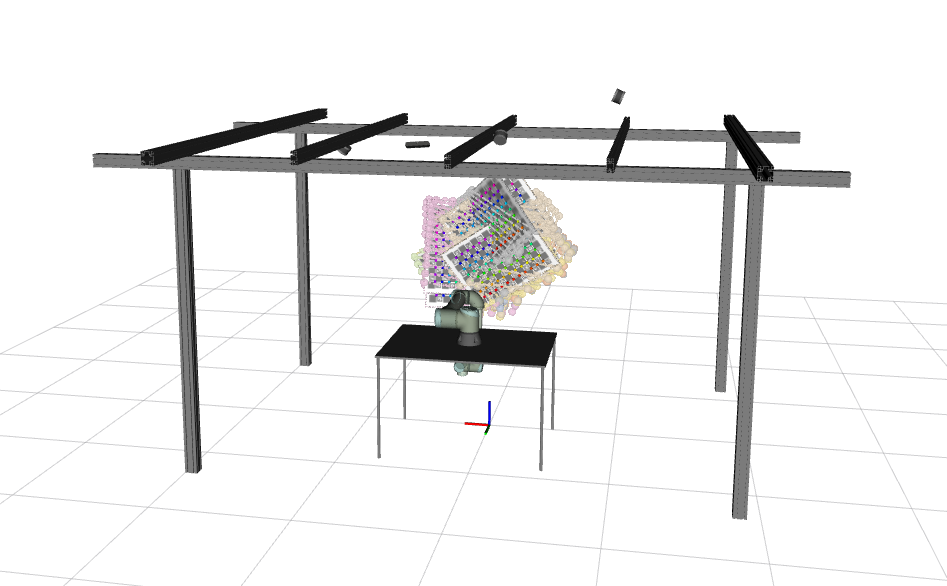
Simulated calibration with 3 LiDARs and 1 camera and conceptualization of the addition of the RGBD cameras to ATOM
This week's progress:
- Callibration in simulated environment using 3 LiDARs and 1 camera. 2 LiDARs and the camera were well calibrated. The other LiDAR had a good x and y but a higher z. I have to make more experiments to understand this
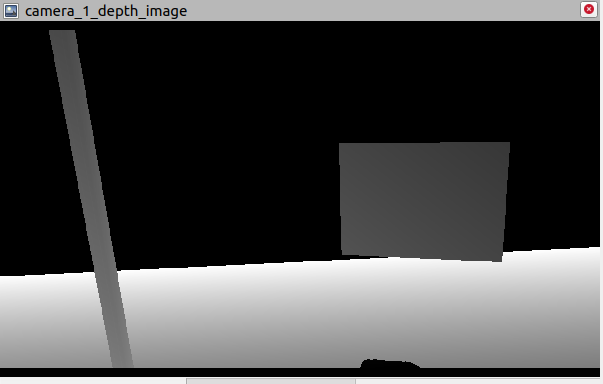
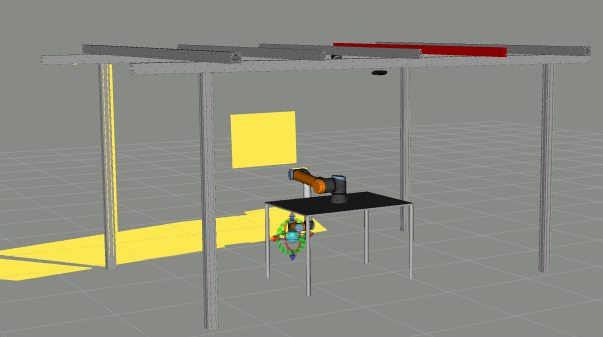
- Conceptualization and brainstorming about the addition of depth cameras to ATOM. The first test will consist in adding the depth component as a LiDAR and see how ATOM deals with it. Then, the way ATOM identifies the sensor needs to be changed. Now, it identifies the sensor type, and consequentially the type of labeler to use, by the type of ROS message that the sensor outputs. This presents a problem to depth cameras: if we use the depth point cloud, it has the message type as the LiDARs, if we use the depth image, it has the same type of message as a normal camera. The idea is to create a specific ID that identifies the type of sensor, instead of the type of messages, and preform the labeling according to that. This also means that the collector needs to be adapted to recognize this sensor IDs. There are also two options to add the depth component to ATOM: depth images of depth points (images above). Both options seem viable and, to the naked eye, seem like they could produce good chessboard detections. The depth points could be labeled with a methodology similar to LiDARs and the depth image could be labeled with a detection of the chessboard corners in the image. The problem of analysing the depth points is that the high resolution of points would probably slow the collector even more, but it would be possible to analyse only a selected sample of the points.
- Check inconsistencies in calibration results with real data
- Check solution to hold the calibration pattern
- Calibration of simulated system with 3 lidars and 1 camera
- Adapt ATOM to calibrate RGBD sensors.
TODO
Issues
Add depth component to ATOM's framework
Add sensor id to interactive markers when collecting data
Calibration in simulation mode - open
Calibration with real hardware - open
(opened but not this week's work)