Problems in RGB-D calibration; Human Pose Estimation State-of-the-Art; Pytorch tutorials
Problems in RGB-D Calibration
As discussed in July, the calibration of an RGB-D camera presents problems in the real world, although the methodology has already been proved successfully in a simulated environment.
Taking this in consideration, I have developed a series of experiments using the more trustworthy camera (Asus Xtion) in which I experimented with 1 collections up to all the collections and also with different initial estimate errors. These experiments let to the conclusion that the error in the calibration results happens with any number of collections and also with different initial estimate errors. It also happens with no initial estimate error, which is suspicious because the RGB-D cameras should come with a factory calibration, meaning that the initial solution should already be the correct one. Nevertheless, the calibration process continues to displace the cameras during the calibration process, which leads me to believe that this might be some camera software problem that I am missing.
Alongside this, a new RGB-D camera needed to be installed in the robotic arm, which had already been discussed in previous meetings. In consequence, a new support had to be made to adapt the new camera (Orbbec Astra Mini) to the gripper. New data is currently being acquired by another fellow. Nevertheless, the RGB-D camera calibration problem must be solved first before starting an attempt to calibrate such a complex system.
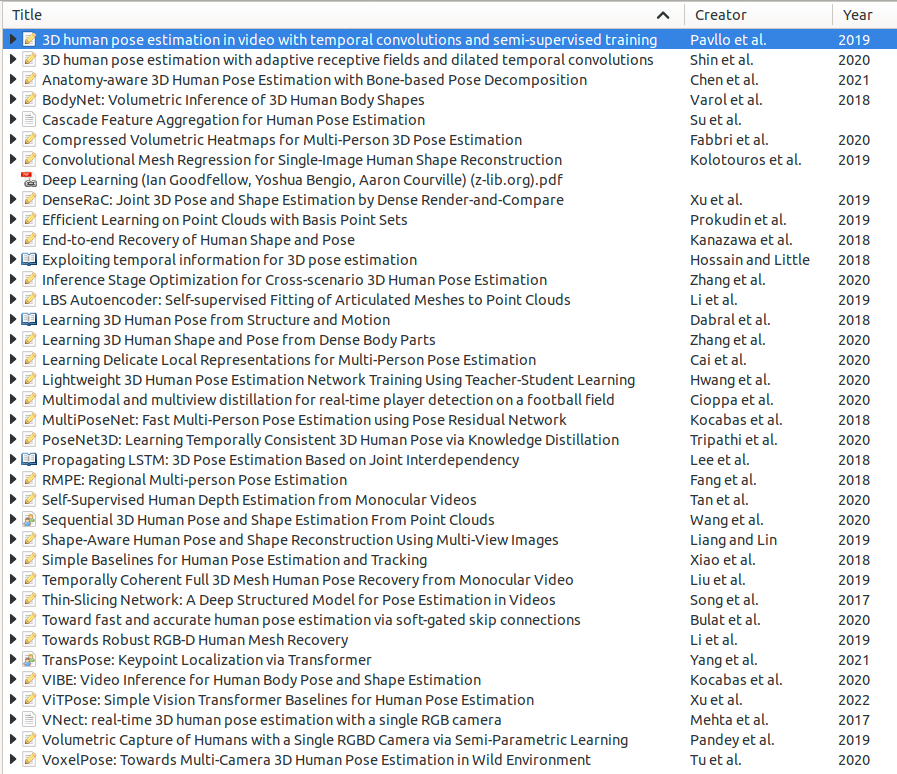
Human Pose Estimation State-of-the-Art
Reading of titles and abstracts to create a database of recent articles of interest to the topic I am researching. Articles retrieved mainly from
https://github.com/wangzheallen/awesome-human-pose-estimation#papers
andhttps://paperswithcode.com/sota/pose-estimation-on-mpii-human-pose
Pytorch and deep learning tutorials
- Intro to Deep Learning with PyTorch (Udacity)
- PyTorch for Deep Learning and Computer Vision (Udemy)
- Goodfellow, I. ; Bengio, Y. ; Courville, A.: Deep Learning : MIT Press, 2016 (Adaptive computation and machine learning). - ISBN 9780262035613
Issues
Hand eye dataset capturing - open