Calibration of RGB-D cameras and hand-eye system development
Calibrating different brands of RGB-D cameras
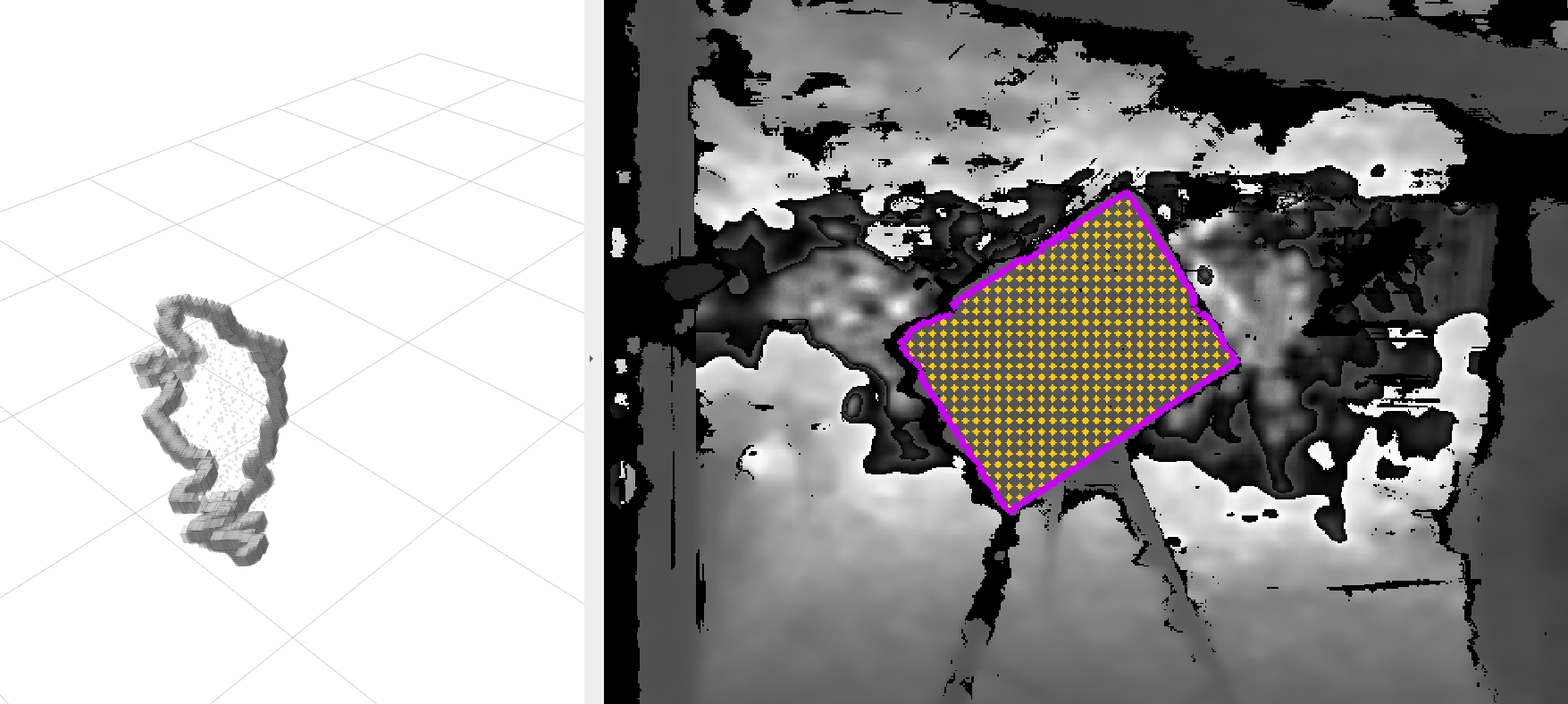
First I calibrated a simulated system with only an RGB-D camera. This system was calibrated with an induced error of 0.1m and 0.1rad. As can be seen in the image above, the calibration was successful and the 3D models of the depth and RGB sensors overlap. The reprojection error of this calibration was 2.43 pixels.
In real world, I tested this calibration in three different camera models: Asus Xtion, Obrecc Astra Pro and Intel Realsense. First, in the orbecc calibration the models of both the sensors had a significant displacement as seen in the image, which led me to think that there might be something wrong in the camera driver since the methodology was proved to be right in simulation. I did not do a reprojection error analysis on this camera.
Calibrating a RGB-D hand-eye system combined with fixed sensors
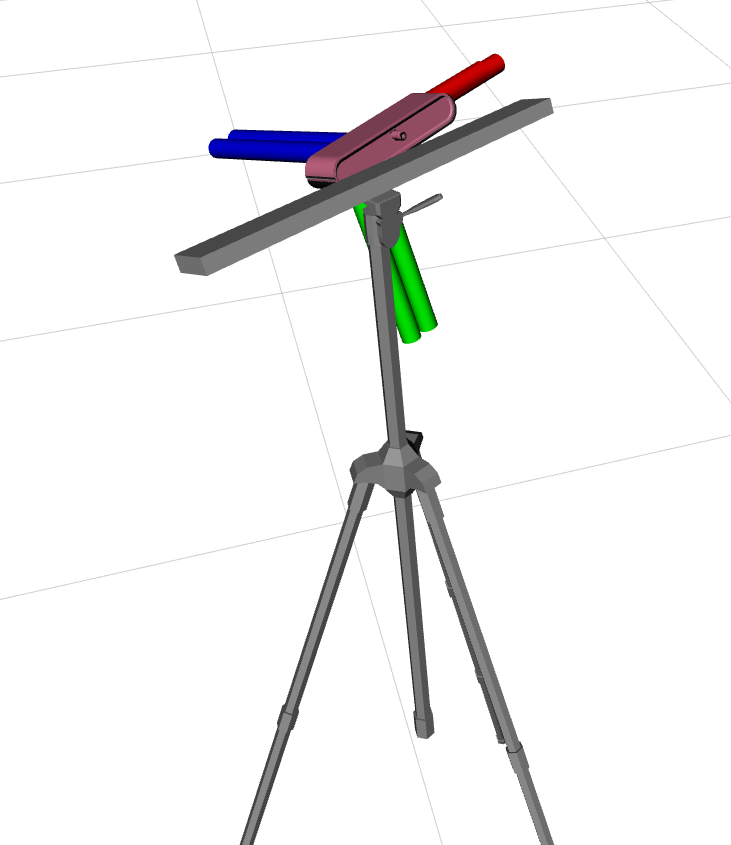
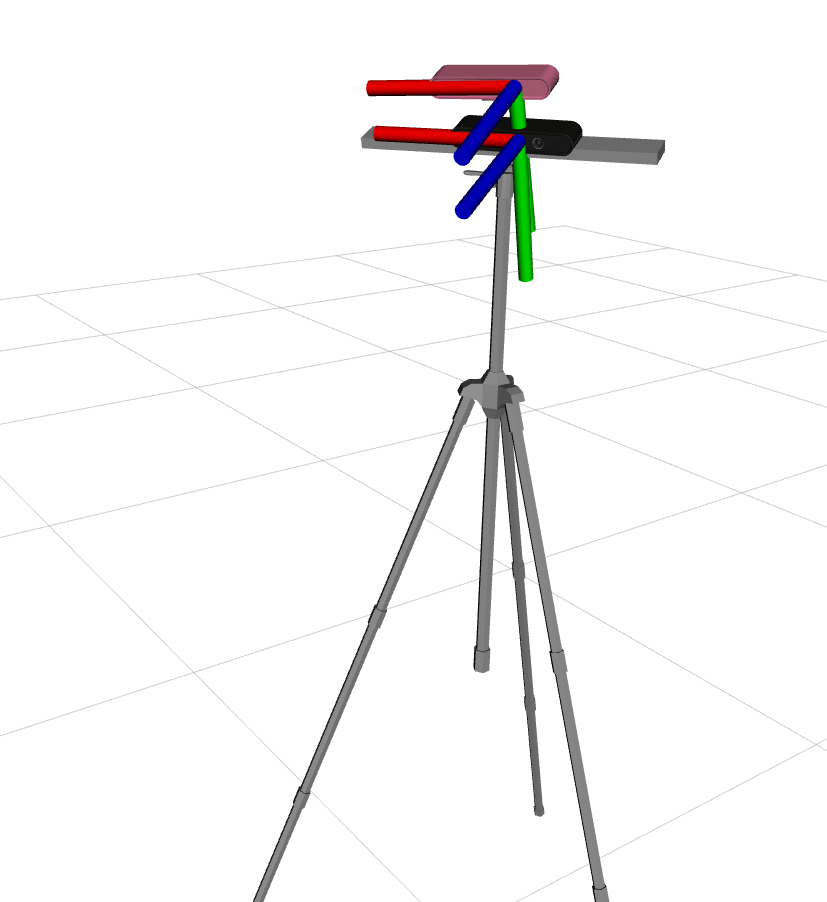
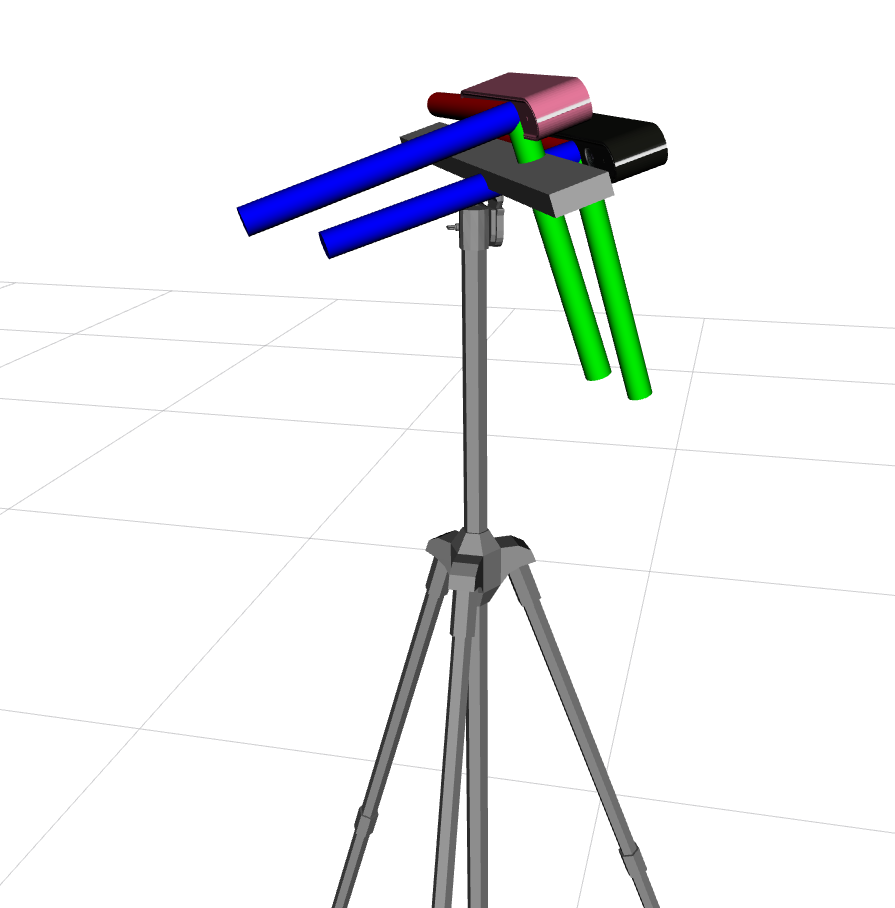
The system to calibrate has 5 sensors: 1 LiDAR, 2 RGBs and 2 Depths. The following image shows the setup that will be used.
.png)
I calibrated this system in a simulated environment with 24 collections and an induced error of 0.1m and 0.1 rad and obtained good visual results. I still haven't proceeded to the reprojections analysis.
I also recorded real data for this system but I used the installed realsense camera, which is now proved to bu unfit for calibration so new data must be acquired with a different camera on the hand-eye system.
Other tasks
- Review and submission of JMS article - first review
- Development of workplan for the 3 months in Barcelona
- Organization of new manuscript for depth calibration
- Writing the introduction
- State-of-the-art about RGB-D and hand-eye systems
Issues
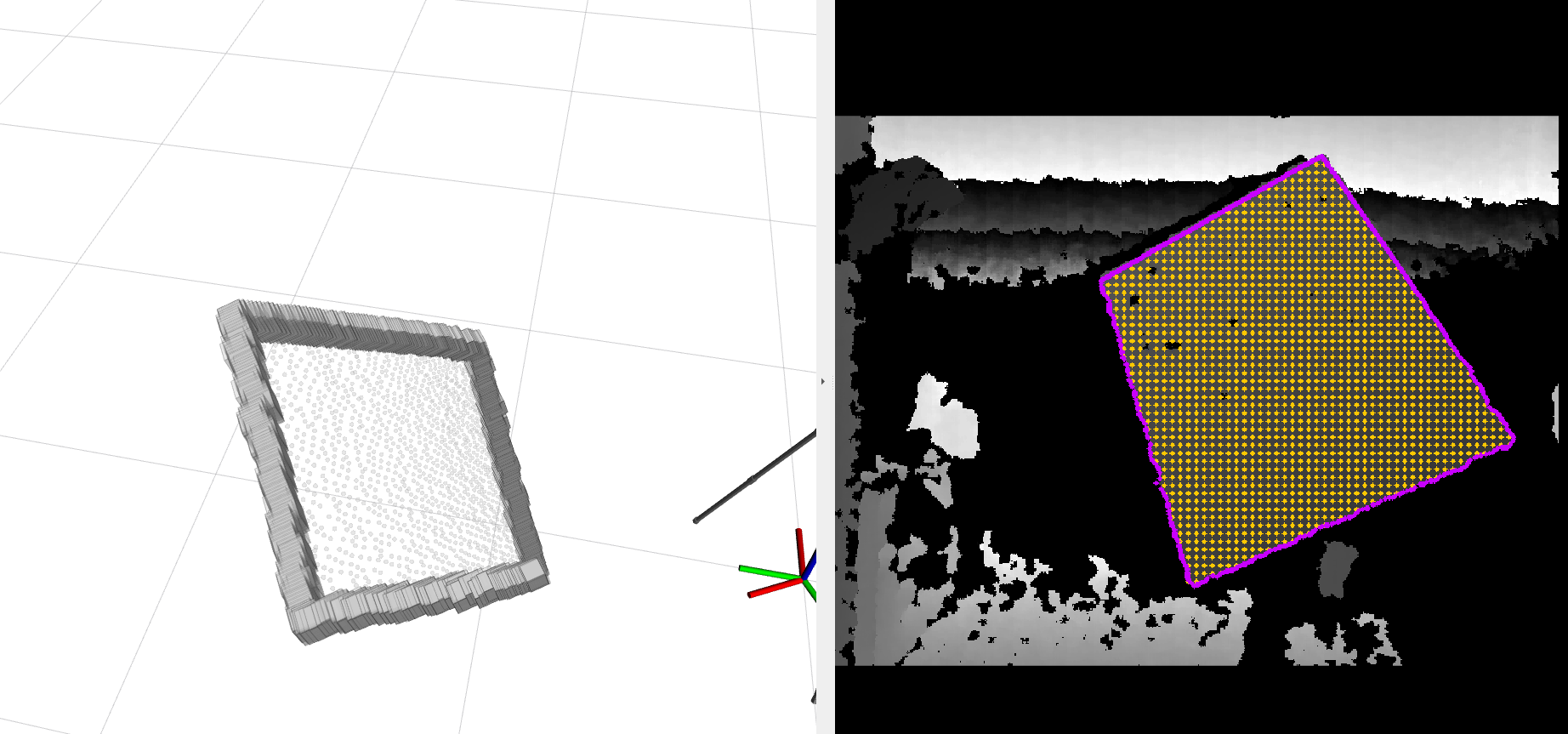
Click mouse to indicate seed point in depth labeling does not entirely work - open
Evaluate if Realsense images are not fit for depth labelling - open
Pyrdown causing error increase in depth modality - open
Images don't appear while calibration due to wrong configuration of rviz template - closed